
Bucknell Engineers Test Advances in Soft Robotics
April 13, 2023
As part of his Presidential Fellowship, Caiden Covell '25 is designing and building his own soft robot. Photo by Emily Paine, Communications
Today's robots may not be the hospitable humanoids or shape-shifting Autobots of past imagination, but engineers are well on their way to producing machines that can walk, swim, crawl and climb as well as any living organism.
These advances are the hallmark of soft robotics, an advancing field that utilizes pliable materials to replicate muscular movements — from octopus-inspired tentacles to fingerlike grippers. In Bucknell's Dana Engineering labs, researchers are designing their own devices inspired by the swift zigzagging of eels and the traveling-wave motion of caterpillars.
"There are so many interesting animals in nature that have flexible bodies that can move in all kinds of directions through different terrains," says Professor William Scott, mechanical engineering, who oversees a small group of student engineers exploring soft robotics. "We're right at the early stages of creating mechanisms, figuring out how they can work and discovering their potential."
Scott's collaborators include Caiden Covell '25, a mechanical engineering major and Presidential Fellow whose robot employs fluid mechanics to snake through water.
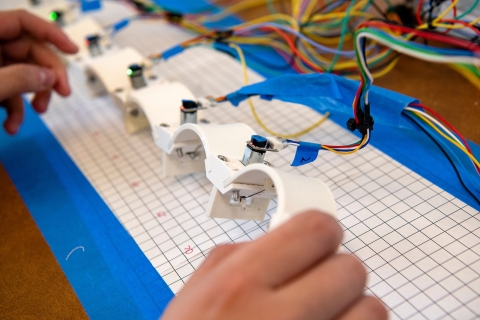
Measuring approximately 12 inches, the device features a series of 28 hollow, rectangular "ridges" connected along a spine. Pumping water through isolated ridge sections activates an oscillating motion "that's similar to how a fish moves, but it's the whole body — not just the tail," Covell explains. "The challenge is figuring out how much water to apply at what time to achieve the best movement."

Mechanical engineering major Caiden Covell '25 (right) is designing a swimming robot under the guidance of Professor William Scott, mechanical engineering. Photo by Emily Paine, Communications
To calculate the optimal water pressure, Covell uses an array of high-tech tools, including micro-controlled pumps, cameras to record the robot's agility and computational modeling software that helps him compare real-life results to theoretical projections. Once that element is fine-tuned, the next phase is testing the device's prowess in the water.
"We've gotten some great movement out of it, but navigating an environment is the real experiment," Covell says. "Once we get this prototype swimming, that's when we'll be able to measure what our machine can really do."
Swimming isn't the only capability they are investigating. Since his sophomore year, mechanical engineering major Harry Shi '24 has been studying how a soft robot might walk via an intricate system of motors and cables.
His design, influenced by the curvature of caterpillars, comprises six bendable, arched segments connected by small devices called actuators. When activated, the miniature motors that form each actuator wind a cable that increases flexion in the soft segments — then propel the robot forward as the cable is released.
Like his labmate, the key to Shi's research is discovering the right combination of tension and release for swift, smooth motion.
"It's a process of adjusting the speed at which the actuators are working as well as when they run," Shi explains. "How does the robot move when the motors are spinning at the same time and speed versus differing intervals? That's what we're on our way to figuring out."
POWERFUL POTENTIAL
Both Shi and Covell's devices are constructed from Filaflex, an elastic material that ensures their robots are not only limber but also incredibly resilient.
"What's attractive about soft robots is their ability to interface with a highly unpredictable environment," says Scott, who worked on similar robotics projects at the University of Maryland prior to joining Bucknell in 2020. "A traditional robot may be able to achieve amazing precision, but that means its expectations have to be just as precise. The minute it bumps into something unexpected, it turns itself off."
Soft robots, on the other hand, can recover in rugged terrain and uncertain conditions, making them the ideal tools for bold and risky operations. A swimming robot like Covell's could explore hazardous underwater depths. Equipped with grippers, Shi's robot might climb up or through where humans can't.
"One of the most common uses being proposed right now is in search and rescue, especially in hurricane or earthquake disaster areas," Scott says.
The caterpillar-like robot designed by mechanical engineering major Harri Shi '24 utilizes a motorized cable system to crawl. Photo by Emily Paine, Communications
But the structural flexibility of these innovative machines isn't without its setbacks. Creating functional parts from the Filaflex material was perhaps the most arduous task for the student-faculty engineering team. Both Covell and Shi spent months imagining and reimagining their devices before settling on workable prototypes.
"Everything is 3D printed, so there was a lot of calibration needed to get the filament to layer exactly right," says Covell, who kicked off his project in 2021. "At first, a lot of our designs didn't hold water. We also wanted the pieces we printed to be usable right away without any other processing, so that took a while to achieve as well."
Despite early challenges — and those that may lie ahead — Scott says he's excited by his students' progress in this experimental field.
"They're so creative and eager to learn how to make things work on their own," Scott says. "The way they run with ideas and come up with solutions I would've never thought of — it's all really fun."

